
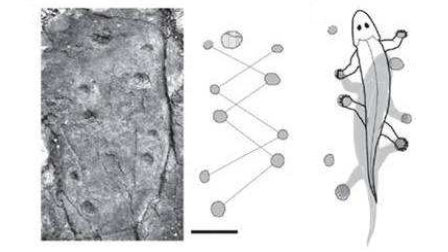
Professor Üner Tan has released an interesting paper online that will be of interest to roboticists titled, “Development of Bipedal and Quadrupedal Locomotion in Humans from a Dynamical Systems Perspective” (PDF format). It starts with a quick overview of the history of gait analysis, starting with Aristotle’s work and the first application of scientific experiments to test gait hypotheses by Gailileo Galilei. The paper focuses on the development of bipedal and quadrupedal walking gaits in humans. I found it particularly interesting that we have apparently inherited the neural systems used for diagonal-sequence quadrupedal locomotion from tetrapods that existed over 400 million years ago (pictured above). The paper goes over what we know about neural central pattern generators (CPGs) and self-organization of complex biological systems. From the paper:
In contrast to the theory of stage-like motor and cognitive development, the perspective of behavioral-motor development as a self-organized process seems to be more plausible to explain why and how infants walk within a particular environment. That is, a previously coded neural network, i.e., neural coding, seems to be unlikely, because of the lack of precise point-to-point wiring in the central nervous system with immense overlaps of dendritic and axonal arbors. The integrative neuroscience emphasizes the ‘inside-out’ and ‘outside-in’ approaches for the understanding of locomotor control.
The paper covers a number of current theories on how gaits emerge in normal and abnormal human development. Each theory is examined from the perspective of what we know about dynamic systems (or dynamical systems as the kids like to call them these days). Lots of interesting information here for anyone working with bipedal and quadrupedal gaits in robotics.