
This morning I noticed this request from Ben Goertzel on the AGI mailing list:
Does anyone know if it’s possible to purchase some sort of
artificial skin for a robot, to enable it to “feel” things that touch it? Even something fairly crude would be worthwhile…
I’ve posted about a lot of robot skin research initiatives over the years at robots.net. The first thing to notice is that there are several possible applications for which something called robot skin might be needed. The first is a flexible human-like skin to cover the bodies of androids or prosthetic devices. This would involved several unique properties not usually needed in other robot skin applications: 1) the skin needs to be self healing 2) the skin needs to be flexible and soft and 3) the skin needs to radiate the same level of heat as human skin. Android skin needs one more thing that is shared with all robot skin applications; the need to sense the environment. Human skin has sensors for a number of properties including pressure, heat, vibration, and pain, some of which combine to form our perception of touch.
Self Healing Skin
The Microvascular Autonomic Research Initiative at the University of Illinois at Urbana-Champaign has developed a bio-inspired material with an embedded microvascular network that mimics human skin. The network supplies a healing agent to damaged surface regions, allowing the material to autonomically heal crack damage to the same location up to 7 times. For all the details, see their research paper, Self-healing materials with microvascular network (PDF format). Also check out the videos of network cracking and healing agent delivery. At present this self-healing skin exists only as research prototypes, there is no commercially available material yet.

Life-like Flexible Skin
The leading edge of research in android skin that looks and feels life-like is Hanson Robotics, in Richardson, Texas. David Hanson has developed a life-like compound called Frubber that is used on the androids developed at the company. This material has moved beyond the research stage and has been used on commercially delivered products by Hanson Robotics. To see more examples of Frubber, take a look at my photos from the Hanson Robotics lab that I shot in May 2009.

Life-like Body Temperature Skin
Current research in this area has used resistive printed circuits to heat the overlaid skin. A typical example can be found towards the article, Bleeding Edge: Flex Circuits as Robot Skin Sensors, by Robert Tarzwell and Ken Bahl of Sierra Proto Express. In the article, they described how screen-print carbon resistor tracks can be laid down on a flexible substrate using a conventional prototyping process to created heated skin suitable for androids. Of course, the first question that comes to mind is how much of a power drain this method would be for an android that has to operate on a portable power supply. The primary demand for this particular skin feature seems to be in the sex doll market. Real Doll (NSFW) has investigated the technologies required for skin heating but not yet found a method they deem practical. At present their customers rely on methods such as immersion in hot water or wrapping in electric blankets to temporarily raise the body temperature of the dolls. That’s a Real Doll number 6 body with a number 9 face pictured above, in case you were wondering.
Research on Robot Skins with Embedded Sensors
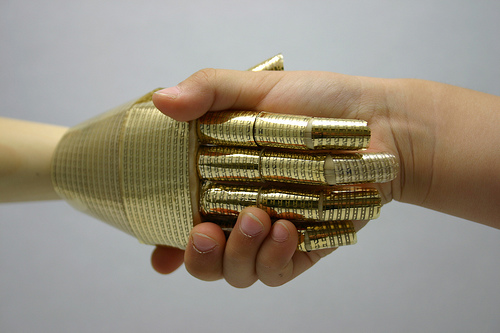
The most useful type of skin, needed by both conventional robots as well as androids, is skin that can sense the environment. There are a number of approaches for creating skins with sensors. The Someya Lab at the University of Tokyo is researching methods of manufacturing flexible skin with an integrated matrix of organic transistors. They’ve created a prototype robot hand covered in the sensors. Their material has a mobility of 1.4 cm2/V·s and can function even when wrapped around a cylinder with a 2mm radius. At present the material is not being produced in commercial quantities. More details can be found in the paper, A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications (PDF format).
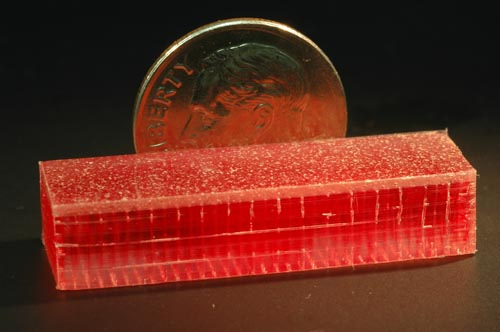
Another approach, taken by researchers at the Mesoscale Engineering Lab of University of Nebraska, uses metal and semi-conducting nano-particles that self-assemble into a thin-film device that generates electroluminescences in proportion to stress. A flexible CCD reads the light emissions, resulting in both lateral and height resolution of texture that is comparable to the resolution of human touch sensitivity on the finger tip at a pressure of 10 kilopascals. Or to translate that into English, this sensor and can touch a penny and generate a legible impression of the engravings on surface of the copper. At present this material is not being produced commercially. For all the technical details see the paper, High-Resolution Thin-Film Device to Sense Texture by Touch (PDF format).
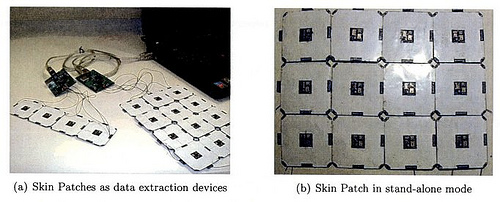
Gerardo Barroeta Perez, while at the MIT Media Lab, proposed an artificial sensate skin he called SNAKE (Sensor Network Array Kapton Embedded). SNAKE was an array of dynamically reconfigurable sensor nodes which could sense strain, bending, proximity, pressure, light, temperature, and even audio. Each node also included i2c bus connections and processing capabilities to extract higher order features such as shadow forms and pressure gradients. Prototype sensor nodes were built but like other projects, this one never reach commercial availability. You can read about it great detail in Perez’s 211 page thesis, S.N.A.K.E.: A Dynamically Reconfigurable Artificial Sensate Skin (PDF format).
Practical Robot Skin
While the previously mentioned research prototypes of robot skin all sound pretty nifty, they aren’t much help if you’re working on a commercial product today. But there are some commercially viable robot skins available if you’re willing to settle for limited resolution and capabilities. For example, researchers from Tokai University demonstrated an easy to manufacture skin for robot pets using easily available materials that included an array of off the shelf shock sensors, a layer of metal foil, and rubber skin. This inexpensive skin was able to distinguish four typical ways humans have of touching pets including a “tickle”, “rub”, “scratch”, and “stroke”. A short technical explanation is available in the paper, Stimulus Distinction in the Skin of a Robot Using Tactile and Shock Sensors (PDF format).
Capacitive Touch sensors were used on the Pleo robot to give a primitive sense of touch through the rubber skin. The engineers reported problems overcome interference caused by having a movable, flexible rubber skin in between the capacitive sensor and the objects it’s supposed to sense. However, they did make it work and it’s a very inexpensive solution. The technical and engineering details are proprietary but you can get a rough overview from the HowStuffWorks page, Pleo’s Sensory System. PlanetAnalog offers a general tutorial on constructing capacitive touch sensors with off-the-shelf parts and the associated electronics needed. Capacitive touch sensor are commonly used on laptops, cell phones, and PDA, so small sensors can be obtained from a wide range of suppliers as well as in lessor quantities from electronic surplus dealers.
Resistive sensors offer similar off-the-shelf possibility for crude touch and pressure sensing. Smaller sensors can be arranged in arrays as needed and are available from industrial electronics suppliers as well as hobby suppliers such as Trossen Robotics.
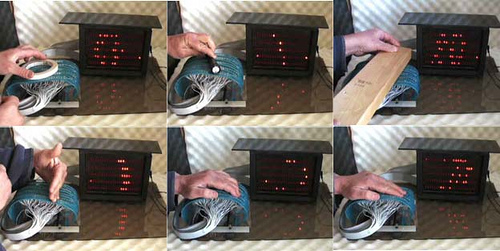
A common trick among electronics hobbyists is using an LED as both a light source and a sensor. By using inexpensive, off-the-shelf LED arrays, one can construct a reflective touch sensor. Unless you’re going for Rudy Rucker’s flicker-cladding approach to robot skins, having a robot covered in bright flickering lights might be a bit annoying. For an example see Jeff Han’s web page on LED touch sensors, which includes the video demonstration, as seen above.
Another hopeful method having at least a crude touch sense with currently available technologies is the use of Flex-actuated bistable domes on a flexible circuitry laminate. Think back to those old calculators that used flexible circuits covered with little bubbles that were depressed by the pushbuttons. Now imagine an arrary of many smaller on/off bubbles covering a large flexible sheet. This method seems pretty straightforward but may not be commonly used because it’s covered by a patent with the associated costs involved in patent royalties. To see an example of this technique in use, see the patent-holder’s website, bistabledome.org.
Other approaches not mentioned in detail here include the use of arrays of capacitor elements, conductive polymer composite films, and a variety of nanomaterials such as aligned carbon nanotubes and nanocomposites. I’ve probably left out others. If you know of any I’ve missed, feel free to post a comment, with links if possible.
More Research Needed
As you can see, more research is needed to find a practical and cost effective way of manufacturing robot and android skins. It’s interesting to note that this is on the agenda for both EU and US robot research. The recently released Roadmap for US Robotics Research specifically mentions the need for sensor skins for use in prosthetics as a 15 year goal. Such skin could easily be adapted for other robotics uses. The EU, meanwhile, have created a research project called Roboskin whose goals include developing a practical skin capable of large area tactile feedback as well as developing cognitive architectures for integrating data from the sensor skins.
To sum it all up, and actually answer Ben’s question, there are a lot of promising robot skin technologies under development but nothing like a large scale sensor skin you can purchase and wrap your robot in today. However, there are several inexpensive, off-the-shelf technologies that can be used right now to create a workable robot skin, some of which have been successfully used in commercial robots already.