Yes, June is over already and it feels like I haven’t gotten anything done. Work has been taking up most of my time. Since I last posted I’ve been to A-Kon 2009. I shot few A-Kon cosplay photos plus a few time exposures of the A-Kon Friday night rave. I also shot a few photos at Jerry Chevalier’s 2009 Texas Build Off, a cool event where movie robot replica builders from all over the world gather to show off their robots and, more importantly, share building techniques and help each work on robots.
I’ve never managed to blog much more than a couple of times a month, so if anyone reading this actually cares what I’m up to, you might want to follow me on twitter or check my canonical home page where you can see the relatively frequent photo stream updates from my crappy mobile phone camera. By the way, if you’re looking for other robot builders to follow on twitter, check out Wired’s list of 52 Robot Geeks on Twitter.
Speaking of twitter, I really need to find a good way to get that integrated into mod_virgule. And speaking of mod_virgule, I once again completely failed to find time to work on it. But I’ve exchanged some email with another programmer who might be brave enough to start doing some hacking on the code, so maybe that will get me motivated in July!
Time for a quick update. May started off with the VEX Robotics World Championship here in Dallas. I was one of the judges evaluating the 270 teams and their robots. I’ll probably write a little more about it in an upcoming issue of Robot Magazine for those who are interested.
I created a robots.net twitter feed and robots.net facebook page for robots.net this month. So far the facebook page is ahead with over 160 fans while the twitter feed only has about 38 followers so far. To be fair the facebook page went online a couple of weeks earlier so we’ll see if it hangs on to the lead over time.
I’m still struggling to find time to devote to mod_virgule but squeezed in a few more hours of C coding on the new HTML parser. It’s now running on a test server with a subset of Advogato’s database. So far, so good. Blog aggregation and parsing seems to be working, as do local blog posting, article posting, and article comments. The magnitude of the changes makes this update a bit of scarier than usual for robots.net and Advogato. If nothing breaks in the next week or so of testing, though, I’ll cross my fingers and make it live.
(this review was originally published on robots.net)
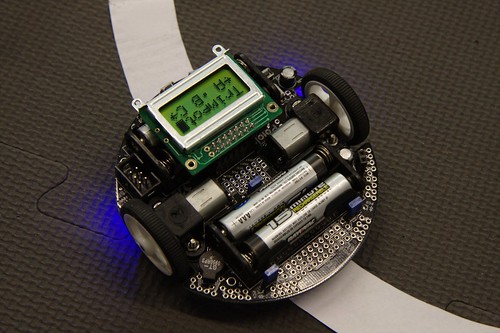
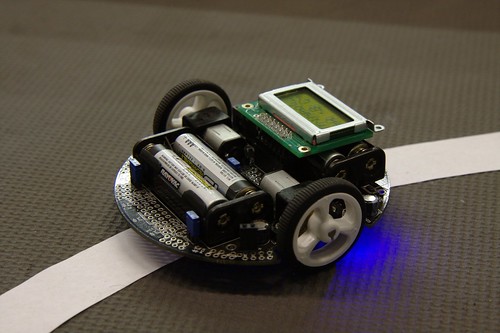
Pololu 3pi on a DPRG line following course
I think this review marks some kind of record for how extensively we’ve tested a hardware product. Normally, when we receive a piece of hardware here at robots.net, we give a brief evaluation and write a basic review of it. So when Pololu sent a 3pi robot in late 2008, I expected to write and post a quick review. As it has turned out, here it is June of 2009 and the 3pi has been more thoroughly field tested than any other robot we’ve worked with. We’ve had way too much fun with this little robot and by the time you finish reading the review, you’ll probably want to buy one or two for yourself. Read on for all the details as well as loads of photos.
Pololu 3pi and AVR ISP in the robots.net testing lab
First of all, I should probably describe the Pololu 3pi. The name comes from the size. The diameter in centimeters is the value pi times 3 or 3pi. In inches it’s about 3.7″ in diameter. The 3pi is a self-contained robot with dual motors, five reflectance sensors, an 8×2 character LCD, a buzzer, 4 AAA batteries, and three user pushbuttons. One minor lack is wheel encoders, without which you’ll never get the little robot to go in a straight line. The 3pi is designed primarily as a line-follower, so this isn’t much of a concern. Still I’d love to see a 3pi v2 (or a 4pi?) that added encoders.
The Atmel AVR ATmega128 processor on the Pololu 3pi robot
Controlling it all is an Atmel ATmega168 (newer models have the ATmega328, which is identical except for having twice the memory). The Free Software and Open SourceGNU GCC tool chain provides a mature, powerful compiler that can do just about anything you need. To make things even more interesting, the controller is compatible with the Arduino microcontroller and all of its software.
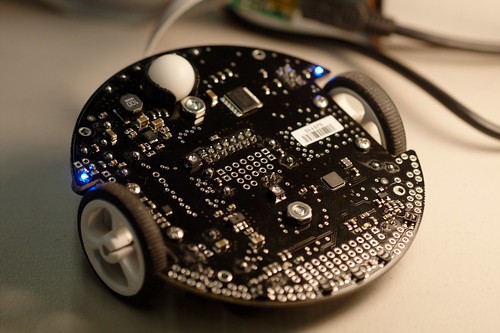
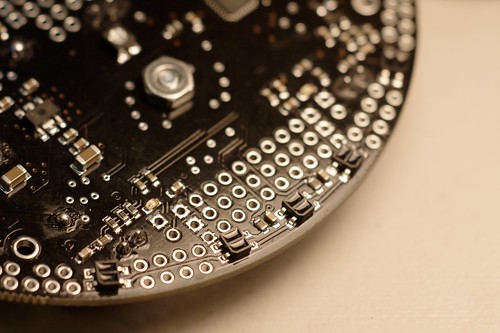
Pololu 3pi – bottom view
I knew almost as soon as I got my hands on the 3pi that it was a really nice little piece of hardware. We included it on the robots.net 2008 Top 10 Robot Christmas Gift Ideas list and it kept rising higher on the list throughout the editing process and finally ended up as your number one recommendation for 2008. I anticipated posting a review shortly after that but playing with the 3pi was so much fun I kept finding new excuses to extend the review process.
Two 3pis
The first thing I wanted to do was present the robot to some other robot builders and get their thoughts, so I took it a meeting of the Dallas Personal Robotics Group and showed it off. Most people who saw it were impressed and several ordered their own shortly afterward. At last count there were at least 10 3pis rolling around the DPRG world headquarters.
Pololu 3pi demo at FenCon 2008
Also in late 2008, the DPRG did a robot demonstration at FenCon, a local literary science fiction convention. I brought along the 3pi as did several other DPRG members. So we had several following each other around a simple hand-drawn, tabletop course as SF fans and guests like Gregory Benford watched in amusement. Later, someone produced a laser printed course made on interchangeable 8.5 x 11 paper. The 3pis are remarkably adaptable to any sort of line; white on black, black on white, narrow, wide, even hand drawn.
While shooting these macro photos, I realized it actually says 3pi on the 3pi, if you know where to look for it. :)
By now I’d determined the basic robot was a pretty neat little device, so I decided to investigate the development tools and ease of setting up a development environment. One thing that really annoys me with some microcontrollers and robot kits is that they rely on arcane proprietary tools that only run on a particular OS. I was pleased to discover the 3pi relies on the GNU GCC tool chain. GCC is free software, which means among other things the source code is available and easy to port. So it will install and run on nearly any computer system and OS you can name.
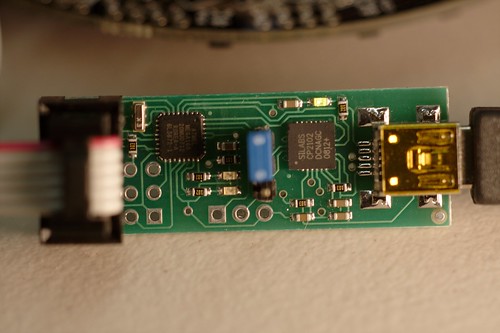
I run Redhat Fedora GNU/Linux on my laptop and desktop. The first step towards a working development environment is making sure the AVR ISP worked. The 3pi came with a Pololu USB AVR ISP. I plugged one end into the 3pi and the other into my laptop’s USB port. Fedora immediately recognized the ISP and started the built-in driver. From what I’ve heard this step may be more complicated for Windows users. Unlike Linux where drivers for nearly everything are built in, Windows often requires the user to search online, download drivers, and install them manually. But on GNU/Linux at least, the Pololu USB AVR programmer works out of the box.
Pololu USB AVR ISPthat works with the 3pi
The next step is to get the AVR-GCC tool chain for cross-compiling from GNU/Linux to the AVR ATmega168. This is easier than it sounds. Just type “yum install avr*” and you’re done. This will install the AVR libraries, the GCC cross-compiler and tools, documentation, and the avrdude utility for moving code from your computer to the 3pi. As with the driver, this may be more involved for Windows users but probably no harder than installing any other Windows program.
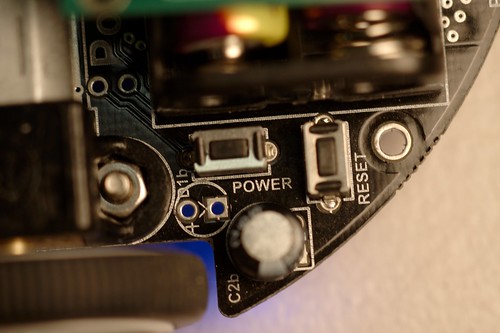
The power and reset button on the Polulu 3pi robot.
The final step in setting up the 3pi programming environment is to
install the Pololu libraries. These need to be downloaded from the
Pololu website and compiled. Here’s how I did it:
Download the compressed .zip file and unzip to a working directory
Type “make install PREFIX=/usr/avr”
You should now be ready to test things out by building one of the demo programs and downloading it to the 3pi. Building it should be just a matter of changing to the directory and typing “make”. Downloading it requires using avrdude. If you haven’t done that before, I’ll save you some time: here’s the command I use, which should get you started:
Most of the demo programs compile to a file called “test.hex” but you may need to adjust that name if you’re working with other source code that is named differently. Also the port I use on my laptop is /dev/ttyUSB0 but your port name may vary depending on what other USB devices are attached and which physical port you’ve chosen to plug the ISP into.
The audio device on the Pololu 3pi
Running avrdude will download the code to the 3pi and you should be ready to go. Overall, I found this process remarkably easy compared to other robots and controllers I’ve worked with which sometimes take days of work to get a cross-compiler working. With the 3pi, I was writing and executing custom code in less than hour.
It was during this process, however, that I found the one major complaint I have with the 3pi. The software library that Pololu provides claims to be licensed under the Creative Commons Share-Alike license version 3.0. Unfortunately, Creative Commons licenses should never be used for software for a variety of reasons including issues related to distinguishing source code from object code. But more importantly, the CC license is incompatible with the GNU GPL license used on most FLOSS software. The intent of the CC-SA license is to take the terms of the GNU GPL software license and apply them to non-software works such as music, art, and photography. Both the Creative Commons FAQ and the Free Software Foundation license guide warn that CC licenses should not be used for software.
One of the gearmotors on the Pololu 3pi robot.
So what does this actually mean for the typical user? As long as you’re writing software only for your own use and not sharing it with others or selling it commercially, you should be fine. If you do intend to share or sell the software you write, your best bet is to avoid using the Pololu AVR library altogether, or contact Pololu about getting a compatible license for your application. I’ve spoken with Pololu about this and they are aware of the issue so there’s a chance they may relicense the library under a Free Software license such as the GNU GPL or some other compatible software license such as the BSD license.
Pololu 3pi on a DPRG line following course
License complaints aside, I now had working code and what better way to test it than in a real life robot competition. The Dallas Personal Robotics Group had one of their annual Roborama contests coming up and these always include a line following event. So I started with the sample PID line following software provided by Pololu and made a few minor tweaks. As I began to test the code on the line following course, it hit me just how fast the 3pi is.
The five reflectance sensors on the Pololu 3pi
The specs say 3 feet per second. Reading that figure doesn’t make the same impression as seeing the tiny robot zipping across the floor. It can easily go so fast that on tight turns, the narrow wheels lose traction, allowing it to fly off the course. With some trial and error I adjusted the robot to have the maximum speed possible given the wheel traction and course material. The final code was so finely tuned that it was necessary to clean the wheels and course prior to each run. A little dust on the wheels was enough to result in a crash.
Three push buttons on the Pololu 3pi robot.
When contest day arrived, the 3pi not only completed the course successfully but won first prize. Even more interesting, the second and third place robots were also 3pis. I’m fairly sure several spectators at the contest were planning to buy 3pi robots by the end of the day.
So what else could I possibly test at this point? The DPRG, always ready with some new challenge, had been asked to host a “robot petting zoo” at a local science fiction convention called AllCon. The idea was to come up with robots that could survive being handled by a lot of children in a large play area. We ended up getting some white VCT floor tiles and creating portions of line following paths on them. The tiles could then be laid out on the floor and re-arranged like puzzle pieces to make all sorts of different line following courses.
Parents watch their kids interact with robots at the DPRG Robot Petting Zoo at All-Con 2009
Not surprisingly things quickly got out of control and kids were trying to slide tiles back and forth in real time while several 3pis raced around the lines at top speed. 3pis were flying all over the place, getting kicked and, in one case, stepped on. How did they hold up? All but one survived with no damage at all. The one that was stepped on lost a wheel but was functional otherwise. With a little superglue, the wheel was reattached and it’s as good as new. Obviously, I don’t recommend you treat your 3pi this way but it’s good to know how sturdy they are.
Finally, just before I completed this review, I joined the DPRG for a demo at the A-Kon Anime convention where they were demonstrating a full-size R2-D2 robot built by group member Glenn Pipe. I brought along a 3pi just for fun and demonstrated it for anyone who was interested. It was here that the 3pi received its biggest endorsement yet. When you get a thumbs up from Jesus Christ, you know you’ve got a good product!
The 19th century Sapir-Whorf hypothesis, that ideas inherent in human languages might influence or limit human thought, has spawned a wide range of claims, some little more than urban legend; like the claim that the Inuit have hundreds of words for snow (they don’t, Inuit has a half-dozen words for snow, that’s fewer than English, and there’s no evidence they think differently about snow than we do). In the 1960s researchers began to formulate tests of the hypothesis. What they learned is that language was more universal than relative, leading them to largely abandon the Sapir-Whorf hypothesis. In recent years, though, advances in cognitive science have made it possible to spot experimental differences that might have been missed before. So is there any real evidence now that language influences thought? A new Edge article by Lera Boroditsky says yes. Boroditsky researches cognitive science and symbolic systems – thought and language. She claims to have found solid evidence in Pormpuraaw, an Aboriginal community in Australia:
the Kuuk Thaayorre, like many other Aboriginal groups, use
cardinal-direction terms — north, south, east, and west — to define
space. This is done at all scales, which means you have to say things
like “There’s an ant on your southeast leg” or “Move the cup to the
north northwest a little bit.” … The result is a profound difference
in navigational ability and spatial knowledge between speakers of
languages that rely primarily on absolute reference frames (like Kuuk
Thaayorre) and languages that rely on relative reference frames (like
English).
She goes on to describe how the researchers tested whether these differences were actually caused by the language or some other aspect of the culture. While these sorts of cognitive differences may not be as significant as early proponents of the “language defines thought” concept imagined, Lera Boroditsky makes the case that they are both real and testable. This is certainly something to think about when designing machines that will think and use language.
If you’d like to learn more, I also found this interesting video of Lera talking about these aspects of language and thought at a Long Now conference.
After the success of last year’s B9 Build Off Day, Jerry Chevailer held a new Build-Off in 2009. This year’s has been expanded to include all type of robots. The even was held at Jerry’s house in Rowlett, Texas. Builders of movie and TV robot replicas from all over the US gathered there for a few days of fun, food, and robot building. The two most heavily represented robots were Star Wars Astromechs like R2-D2 and the Lost in Space B9 robots. Member of several robot groups attended including the Dallas Personal Robotics Group, the B9 Builders Club, and the R2-D2 Builders Group.
I was able to stop by for a few hours and shoot some photos. Unfortunately, it rained that day so most of the robots were squeezed into the house and garage. It was sunny the next day and I heard that I missed Astromech street racing as well as some pretty amazing dancing by Jerry’s B9. For more photos of the event, check out my full Texas Build Off photo gallery on Flickr.
Two B9 robots hanging out in the garage
Robby, Gort, and some Star Wars droids
B9 builders did a live video chat with Dick Tufeld, voice of the Lost in Space robot